subsumption architecture
Table of Contents
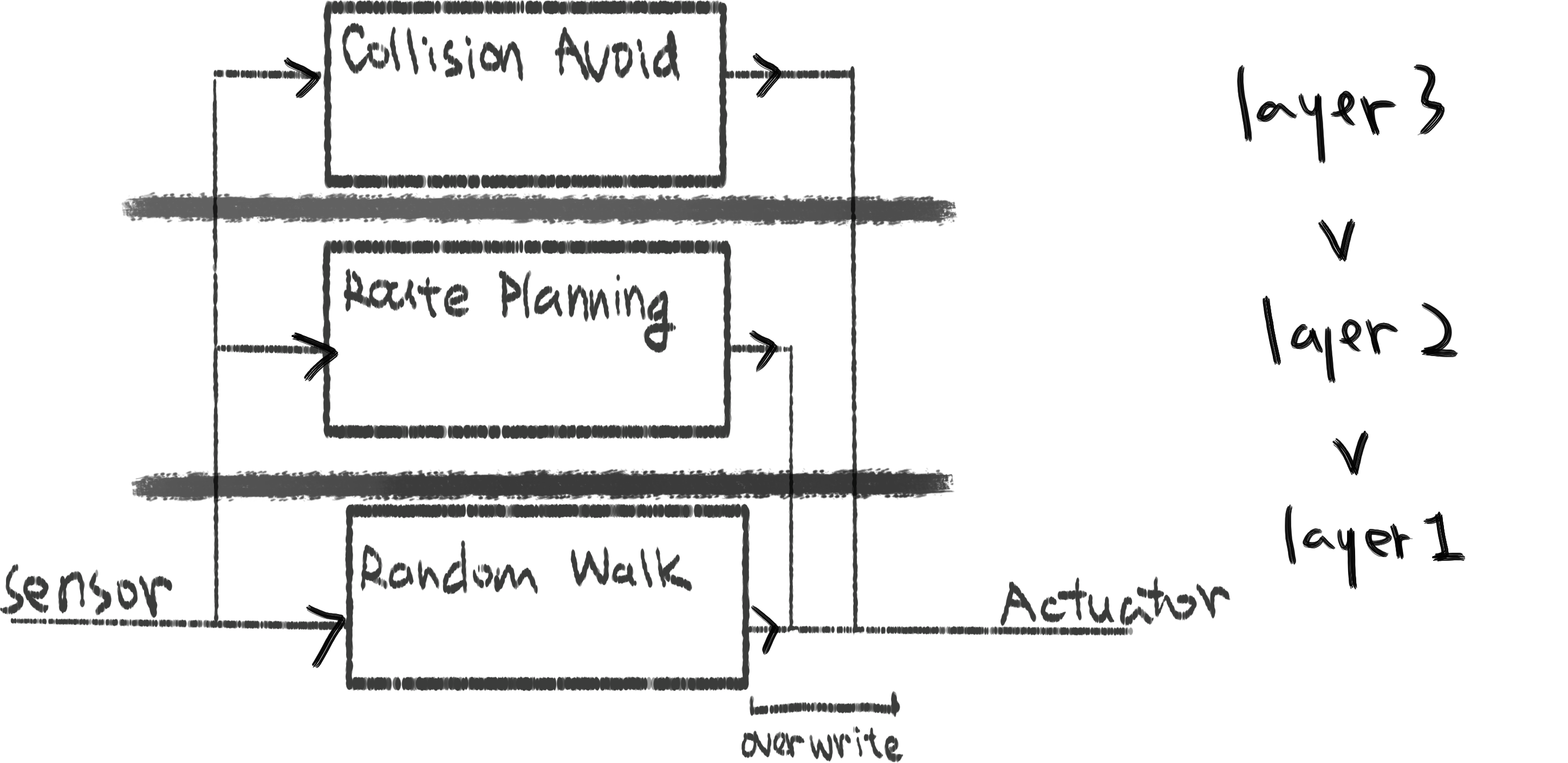
Subsumption Architecture[1] is a layering robot controll paradigm.
1. Layer of control definition ATTACH
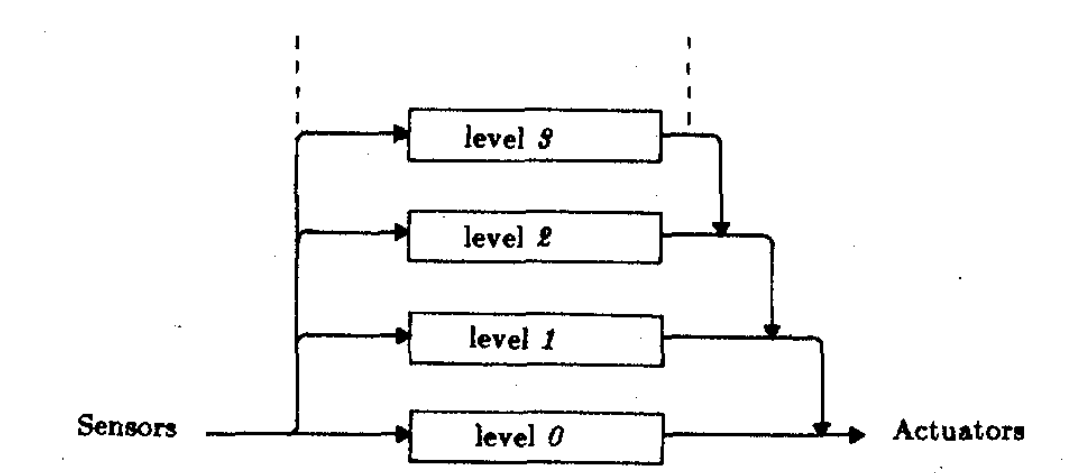 system is devided into layers, where higher level layer may take control of the system when they are activated.
system is devided into layers, where higher level layer may take control of the system when they are activated.
Backlinks
(Subsumption architecture)
Subsumption architecture in is implemented with Layer of control definition and trigger-action layer definition.
- Behaviour
- each behaviour corresponds to a layer in subsumption architecture defined with trigger-action layer definition
- single thread state machine
- LSMEW uses a single thread to embody each state, in which a sequence of trigger-states with descending priority(each trigger-state suppresses all states after it) is checked one by one on unsatisfaction, until a trigger-state delivers a message of truth(or triggered), when all following triggers would be supressed, and the linked action would be performed for one step.

- Graceful stop
- As each behaviour is totally seperated, and there’s no parallel processing, when 2 consecutive actions are from different behvaiours(2 different action state), an additional “graceful stop” method would be performed on the former, so as to keep internal representations of behaviours intact. This extension can also be implemented equivallently with a “stale check” state that reinitializes internal representation when finding internal representation stale in each action.
trigger-action layer definition
(trigger-action layer definition)
 In Layer of control definition, each level of behaviour could be defined with the tuple \([trigger, action]\) in which :
In Layer of control definition, each level of behaviour could be defined with the tuple \([trigger, action]\) in which :
- when higher level behaviour’s trigger returns true, input to lower level is suppressed
- when a behaviour’s trigger returns true, it’s action is perfomred
In principle, all layers’ triggers are concurrently monitored, so if any behaviour have been triggered, they may be enacted; an implementation by lejos uses a single thread to enumerate triggers from top priority
2. ASFM definition ATTACH
 In implementation, Brook uses AFSM, in which the whole system uses
In implementation, Brook uses AFSM, in which the whole system uses 1 giant AFSM with lots of states
With this definition, subsumption architecture adds new syntax supressor connection and inhibitor connection. In this definition using subsumption architecture indicates 2 things to bare in mind in the development process:
- organize states that represent the same behaviour into the same layer
- when the lower level layer is done, only addition of inhibitor and supressor connectings to connections are allowed; you cannot rearrange lower layer states, you cannot change the lower layer code.
3. trigger-action layer definition ATTACH
In Layer of control definition, each level of behaviour could be defined with the tuple \([trigger, action]\) in which :
- when higher level behaviour’s trigger returns true, input to lower level is suppressed
- when a behaviour’s trigger returns true, it’s action is perfomred
In principle, all layers’ triggers are concurrently monitored, so if any behaviour have been triggered, they may be enacted; an implementation by lejos uses a single thread to enumerate triggers from top priority
Backlinks
(Subsumption architecture)
Subsumption architecture in is implemented with Layer of control definition and trigger-action layer definition.
- Behaviour
- each behaviour corresponds to a layer in subsumption architecture defined with trigger-action layer definition
- single thread state machine
- LSMEW uses a single thread to embody each state, in which a sequence of trigger-states with descending priority(each trigger-state suppresses all states after it) is checked one by one on unsatisfaction, until a trigger-state delivers a message of truth(or triggered), when all following triggers would be supressed, and the linked action would be performed for one step.
- Graceful stop
- As each behaviour is totally seperated, and there’s no parallel processing, when 2 consecutive actions are from different behvaiours(2 different action state), an additional “graceful stop” method would be performed on the former, so as to keep internal representations of behaviours intact. This extension can also be implemented equivallently with a “stale check” state that reinitializes internal representation when finding internal representation stale in each action.
(Subsumption architecture)
Subsumption architecture in is implemented with Layer of control definition and trigger-action layer definition.
- Behaviour
- each behaviour corresponds to a layer in subsumption architecture defined with trigger-action layer definition
- single thread state machine
- LSMEW uses a single thread to embody each state, in which a sequence of trigger-states with descending priority(each trigger-state suppresses all states after it) is checked one by one on unsatisfaction, until a trigger-state delivers a message of truth(or triggered), when all following triggers would be supressed, and the linked action would be performed for one step.
- Graceful stop
- As each behaviour is totally seperated, and there’s no parallel processing, when 2 consecutive actions are from different behvaiours(2 different action state), an additional “graceful stop” method would be performed on the former, so as to keep internal representations of behaviours intact. This extension can also be implemented equivallently with a “stale check” state that reinitializes internal representation when finding internal representation stale in each action.
4. links
5. another definition
Subsumption architecture is in its core Augmented finite-state machines
Bibliography
Backlinks
robot control system specification language
a lisp extension designed and described in [1], to specify a layer in subsumption architecture.
The language assume a model of Definite State Machine of the layer.
Each state is of the following 4 types:
- output
- an output message -> actuator. (then enter a new state)
- side effect
- manipulate an internal variable of the layer (then enter a new state)
- conditional dispatch
- (if predicate stateA stateB). predicate use internal variable or inputs.
- event dispatch
- (cond predicateA stateA predicateB stateB predicateC stateC …).
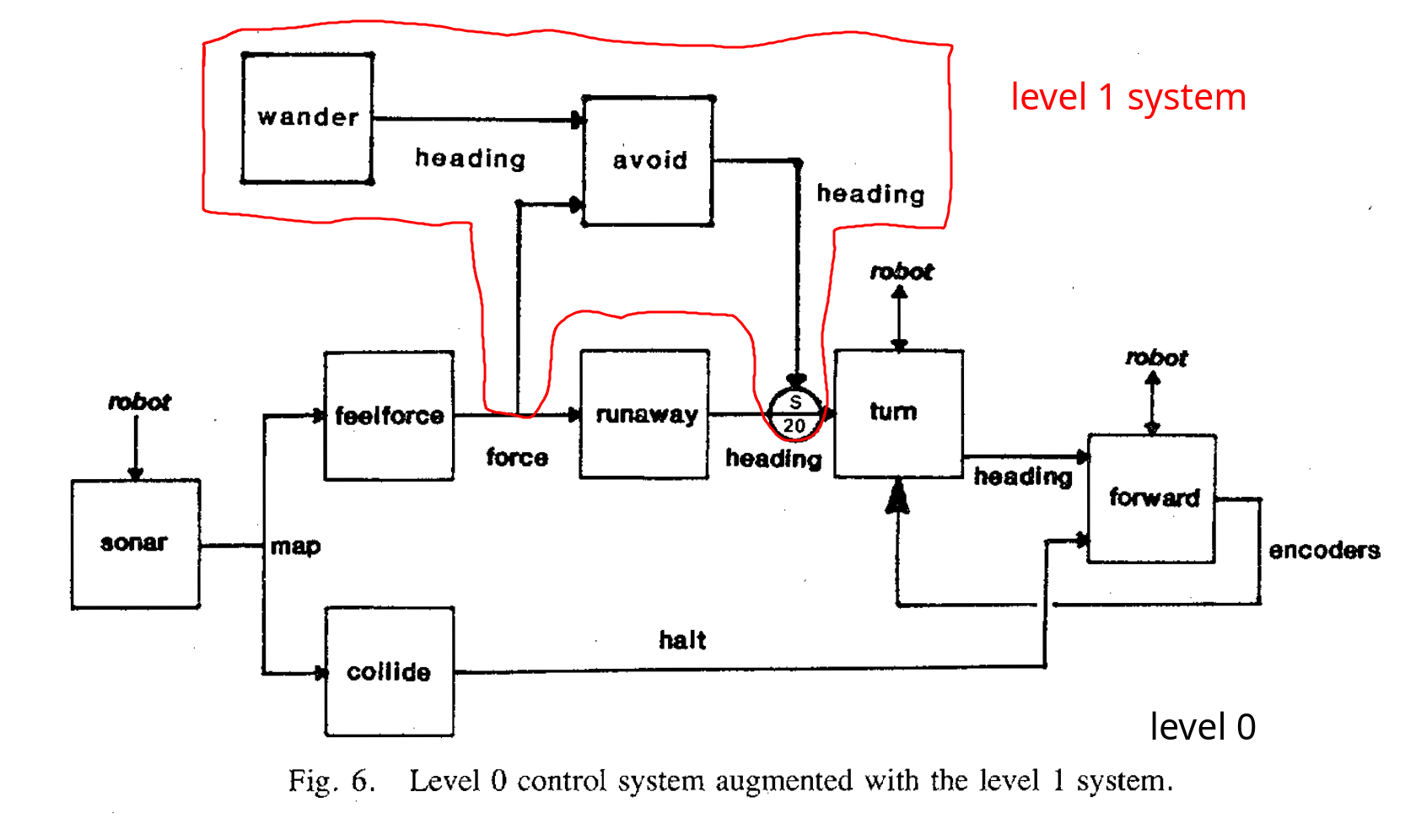
(defmodule avoid 1 :inputs (force heading) :outputs (command) :instance-vars (resultforce) :states ((nil (event-dispatch (and force heading) plan)) (plan (setf resultforce (select-direction force heading)) go) (go (conditional-dispatch (significant-force-p resultforce 1.0) start nil)) (start (output command (follow-force resultforce)) nil)))
lifestyle script
(The human processor of lifestyle script: 3 layer model)
The lifestyle script is not executed by a computer program, it is executed by a human, very likely who wrote the script.
A subsumption architecture-like paradigm of human behaviour is assumed:
level-3 living-essential level-2 script level-1 spontaneity
with living-essential oppressing script and spontaneity, and script oppressing spontaneity.
What this means is that with script, you halt only when living-essentials are triggered like being very hungary or dehydrated. Whenever a rule in the script is triggered, and there’s no living emergency (which your body would tell), you halt any act of spontaneity, and do the action in the script.
injection
(projection-induced injection)
projection-induced injection refers to the protocol of doing injection when some tool is required in projection.
An example is like:
- try to use subsumption architecture in a project [projection require internel representation of subsumnption architecture]
- realize that I don’t really know what subsumption architecture would really look like
- inject a whole network of subsumption architecture from some materil I found online into my internel representation(zettelkasten)
Typical characterisitics of this type of injection is that:
- it is based on the material - you are still injecting the whole concept of subsumption architecture, with a mechnism like BFS. you don’t just get what you need and get off; you get the whole thing, and then you get back to the projection, and only use a subset from it.
zettelkasten activity report
(2024 > 02 - February > )
in 02/17/24 to 02/18/24, created 594 nodes (this is not accurate, I think that probably is the day I move everything from /home/Notes to /home/Dropbox/Notes)
- skipping rope
- whether feeling awesome determines my day
- keyboard for all
- automatic work
- getting element parent offset in js
- Wirth, N. ::: A Plea for Lean Software
- propositional logic
- org-capture behaviour break
- Introspective Visuomotor Control: Exploiting Uncertainty in Deep Visuomotor Control for Failure Recovery]]
- sleep
- self-organizing map
- X11 drawing app
- Touati, Ahmed and Ollivier, Yann ::: Learning One Representation to Optimize All Rewards
- forward-backward framework
- Herman
- process capture
- software is getting fatter just because food are there
- transfer firefox to new machine
- neuron
- myotatic crunch
- xdg-open
- old index
- New Insights into Olivo-Cerebellar Circuits for Learning from a Small Training Sample]]
- highlight + comment method is slow
- use zettelkasten as software engineer
- essay as linear stream traverse of arguments
- social as primitive
- cheatsheet
- don’t fake connection
- ../reference/ahrens_how_to_take_smart_notes.org][Ahrens">How to Take Smart Notes]]
- org-roam
- computer forensics
- linux command place
- embedding
- lifestyle script
- recipes
- connecting imply information
- common zettel categories
- download font in css
- latex
- review 2024-01-27
- zettel name length is not important
- cat vomit exercise
- temporal-difference learning
- thesis
- ../references/alexanderExtendedSubdomainsSolution2023.org][Alexander">Extended Subdomains: A Solution to a Problem of Hernández-Orallo and Dowe]]
- binding
- select thinking primitives in artificial child
- review inbox.org
- emacs allow primitive programming
- plantuml
- unsupervised learning
- ../reference/samsonovichSociallyEmotionalBraininspired2020.org][Samsonovich">Socially Emotional Brain-Inspired Cognitive Architecture Framework for Artificial Intelligence]]
- demension reduction
- centering element in css
- zettel
- regression is fitting line onto data points
- doubly linked list in common lisp
- webring
- coding the activity
- transformer encoder
- free jam session
- Izhikevich, E.M. ::: Simple Model of Spiking Neurons
- rime
- tags
- reasoning depend on motivation
- elitism in programming/design
- not complying to lifestyle script
- kernel panic not syncing
- ../reference/peiArtificialGeneralIntelligence2019.org][Pei, et al.">Towards Artificial General Intelligence with Hybrid Tianjic Chip Architecture]]
- start state
- hacking uol timetable
- helpful activities
- probability distribution
- bcrypt
- fake connection easily collapse
- multilayer perceptron
- Aliman, Nadisha-Marie and Elands, Pieter and Hürst, Wolfgang and Kester, Leon and Thórisson, Kristinn R. and Werkhoven, Peter and Yampolskiy, Roman and Ziesche, Soenke ::: Error-Correction for AI Safety
- Hebb’s rule
- emacs follow-mode
- Luc Steels
- sleep in js
- regression
- Agent
- boiling egg
- atomicity test: referred seperately?
- putting space in css
- active discussion state
- selection of primitives
- wired could be good for skill practice
- add class to element in js
- Quality vs. Duration
- ../../../../playground/Roamnotes.bak/georgeonIDEALMOOC.org][Georgeon, Olivier L.">IDEAL MOOC]]
- mindmap
- turing machine
- coordinated effort require consistency
- prefix code system
- prefix property
- Sparks of Artificial General Intelligence: Early Experiments with GPT-4]]
- activity-based plan and stage-based plan
- free knowledge
- structure
- lilypond
- my CV-related notes and compilations
- advice
- 4-spaced feeding schedule
- homogeneous content
- citeexport without using org-cite link
- memex
- institutions working on developmental AI
- anacron
- wired is not good for creative experience
- experimental lifestyle
- Complexity of Algorithms
- comp202
- counting notes in blues
- learn from experience is research
- artificial intelligence is another name of algorithm
- foundation model
- Protesilaos Stavrou
- helpful activity
- inovation by using existing technique
- ::: GROUNDING MULTIMODAL LARGE LANGUAGE MODELS TO THE WORLD
- death
- one global entrance
- Clemens Scott
- Herman’s Life Policies
- pattern in code
- hierarchy of primitive actions
- 2 kinds of academic work
- Martin Pearson
- embodied paradigm
- lack of passion
- fail senarios of lifestyle script
- sparse vector encoding
- human cycle
- firefox profile
- mouse drag scroll in js
- best inspiration are from the band
- motivational reasoning
- Information and knowledge don’t fit in paradigm of consumption
- narrative in communication
- Oja’s rule
- element style transition in css
- ../reference/correaDimensionalityReductionVery2007.org][Correa, Renato and Ludermir, Teresa">Dimensionality Reduction of Very Large Document Collections by Semantic Mapping]]
- use memory palace to programme habit
- think of reward
- Mindset
- do something to every file in elisp
- repeated skimming works on badly organized material
- list of awesomeness induction tools
- zettel should be atomic
- my experience on being wired to phone
- click shield in css
- atomicity make bad note better
- citar
- repeat tasks
- description logic
- about
- 30 minute dumping as primitive
- SAGE: Task-Environment Platform for Evaluating a Broad Range of AI Learners]]
- zero-shot learning enables novel case handling
- policy
- repeated skimming
- noise tolerance of zettlekasten
- query knowledge base
- ditch volume control
- slide
- Pitch Class and Octave-Based Pitch Embedding Training Strategies for Symbolic Music Generation]]
- Petzold, C. ::: The Annotated Turing: A Guided Tour Through Alan Turing’s Historic Paper on Computability and the Turing Machine
- tar
- implementing keyboard primitives
- about this zettelkasten
- zettelkasten and mindmap are structurally similar
- current life script
- getting element position in js
- John Kitchen
- capture or doodle
- connection
- secret hitler
- use font in css
- main:entry point of C program
- low information diet
- multiple org-roam notebases
- mindmap on many ideas
- freeplane
- [[][]]
- pipelining mindmap to zettelkasten
- ::: Fast Imitation via Behavior Foundation Models
- material of learning
- when to use macro
- typescript
- use zettelkasten to write code
- using closed resource in try-with-resource clause
- meta
- org-roam roam-refs
- abstract tasks
- open questions
- skepticism
- playing game on linux
- using chatGPT
- Christopher G. Atkeson
- use of project zettelkasten
- latex for logic
- capture
- Versatility-Efficiency Index (VEI): Towards a Comprehensive Definition of IQ for AGI Agents]]
- dynamic machine learning
- artificial memory systems
- documentation
- preview before lecture
- foundation model contains generic human behaviours
- strategy booster
- code zettel as component
- parallel movement
- my research system
- attending and slipping
- tridactyls
- equality as in shared access
- using google
- wired to phone
- Firoozi, Roya ::: Foundation Models in Robotics: Applications, Challenges, and the Future
- mentally hard work
- be temporate
- compose from ideas
- finding paper
- research on new knowledge
- customizing reasoning
- customizing logic
- attention counts
- navigation zettel
- styling org-mode html
- ::: Amortizing Intractable Inference in Large Language Models
- my writing style
- Reactive Booster
- cron
- ../reference/goertzelArtificialGeneralIntelligence2014.org][Goertzel">Artificial General Intelligence: Concept, State of the Art, and Future Prospects]]
- learning
- primitive action may not be trivial
- essay
- ../reference/eberdingSAGETaskEnvironmentPlatform2020a.org][Eberding, Thórisson, Sheikhlar, Andrason">SAGE: Task-Environment Platform for Evaluating a Broad Range of AI Learners]]
- phone in heterogenizing activity
- kernel learning
- speaking english
- use project zettelkasten to program
- numbering system
- turing complete
- dopamine tonic release
- subsumption architecture
- physical mental environment
- org-mode citation latex export
- recreate book with zettels
- life coach
- output patterns as primitive for understanding
- unwiring
- ink drawing
- time for waking up
- C-language
- zero-shot learning
- java
- start new feature with git
- developmental skill aquisition with general purpose actuator
- Lara, Bruno and Astorga, Dadai and Mendoza-Bock, Emmanuel and Pardo, Manuel and Escobar, Esaú and Ciria, Alejandra ::: Embodied Cognitive Robotics and the Learning of Sensorimotor Schemes
- poisonous thought
- org html export css
- dopamine schedule
- malloc instead of array syntax
- Q-function
- Q-learning
- ::: GENSIM: GENERATING ROBOTIC SIMULATION TASKS VIA LARGE LANGUAGE MODELS
- paper analysis
- common bugs
- ACT-R: A Cognitive Architecture for Modeling Cognition]]
- SH:credit government for fascist policy
- dopamine phasic release
- bind key in doomemacs
- The Neural and Cognitive Architecture for Learning from a Small Sample]]
- org-ref
- fine-tuning
- dopamine trigger layering
- scheduling activity
- ditaa
- atomic notes make reference easy
- human language simulation layer
- memory skill
- highlight + comment method
- hide arbitary detail of code in zettelkasten
- iteration
- type of foundation models
- choose details
- perception being solution
- foundation knowledge
- solidify = repetition
- growth mindset
- Agent decides
- select thinking primitives to better mental state
- Eb blues
- graph and text as primitive actions in state space of ideas
- knowledge base
- zettelkasten as cheatsheet collection
- recent break thorugh in foundation model
- add and remove children to element in js
- SH:framing
- clicking button to enlarge its parent in js
- biological process is computation process
- performance enhencing memory systems
- line hatching
- feeding schedule
- weight likes triaining data likes input
- biocomputation
- highlight colour coding
- small and simple works
- zettelkasten mental model of book and articles
- Aliman, Elands, Hürst, Kester, Thórisson, Werkhoven, Yampolskiy, Ziesche ::: Error-Correction for AI Safety
- KRG paradigm
- degree of generality
- daily ritual
- essay as polished product
- org-mode in-buffer configuration
- css syntax
- Gehninfel
- zettelkasten and mindmap are interchangeble
- ::: ANTGPT: CAN LARGE LANGUAGE MODELS HELP LONG-TERM ACTION ANTICIPATION FROM VIDEOS?
- search pdf in google
- wiredness narrows
- prerequisite of lifestyle scripting
- building digital garden around zettelkasten
- robot control system specification language
- diet
- artificial general intelligence
- agi
- ../heDeepResidualLearning2015.org][He, Kaiming and Zhang, Xiangyu and Ren, Shaoqing and Sun, Jian">Deep Residual Learning for Image Recognition]]
- top of my mind
- file sharing
- autonomous mobile robotics
- i3
- not connecting is ok
- Touati, Ahmed and Rapin, Jérémy and Ollivier, Yann ::: Does Zero-Shot Reinforcement Learning Exist?
- my research proposals
- deserialization
- draw end points first
- pipewire
- Human, all too human
- zettels as primitive
- fashion
- css class positioning
- docker
- Herman’s systems
- find files in elisp
- artificial child
- fake monitor
- get children in js
- listening in communication
- duplicate element in js
- simplicity against exponential growth of complexity in modern computing
- git
- local effort is more practical than coordinated effort
- AI evaluation framework
- component-based software engineering
- bag
- fashion is toggle more than advance
- good capture habits
- Team SyCoSMA, LIRIS
- websites worth noting
- version control with org-mode
- perfection while creating
- selling information
- practice to remember
- interdisciplinary ideas can be trivial in the intered disciplines
- finding resource
- knowledge representation
- note-taking
- discipline
- literate programming with org-mode
- active discussion state is slow
- planning
- plan
- modal logic
- ablation study
- Kazumi Tateishi Trio
- task base on material
- proactiveness in learning
- research workflow
- too-early optimization
- McCulloch-Pitts Neuron
- developmental labs
- warm-up to induce state
- traditional deep learning scene
- kernel routine
- skimming
- practice to perceive
- reactive workflow
- dedicated session
- latex for algorithm
- Jeff Schneider’s 10 licks
- Aubret, Arthur and Matignon, Laetitia and Hassas, Salima ::: An Information-Theoretic Perspective on Intrinsic Motivation in Reinforcement Learning: A Survey
- writing with zettelkasten is convenient
- Fanchon Frohlich
- levels of wiredness
- focus booster
- foundation model for sensor fusion
- paint like sculptor
- Aaron Swartz
- read
- logic
- avoid getting wired by heterogenizing activity
- stance
- luhmann id
- difference of dopamine level = motivation
- selling service
- information don’t cost
- download from scribd
- my daily behaviour
- notes on COMP343 lab activities
- overcoming myself
- getting code snippets
- we think what we hear
- one-shot job
- tailscale
- common lisp
- research startup
- style property overwrites class
- feeling awesome
- flameshot
- moderate work
- Wong Pei Artificial General Intelligence a gental introduction
- agi-intro
- noise tolerance of hierarchy note
- Cognitive Architecture and Instructional Design: 20 Years Later]]
- javascript
- jazz piano
- dance
- resource restriction
- vicinity of primitives
- David Allen Getting Things Done
- primitive action can be acquired
- create element in js
- learn it the real way
(Subsumption architecture)
Subsumption architecture in is implemented with Layer of control definition and trigger-action layer definition.
- Behaviour
- each behaviour corresponds to a layer in subsumption architecture defined with trigger-action layer definition
- single thread state machine
- LSMEW uses a single thread to embody each state, in which a sequence of trigger-states with descending priority(each trigger-state suppresses all states after it) is checked one by one on unsatisfaction, until a trigger-state delivers a message of truth(or triggered), when all following triggers would be supressed, and the linked action would be performed for one step.
- Graceful stop
- As each behaviour is totally seperated, and there’s no parallel processing, when 2 consecutive actions are from different behvaiours(2 different action state), an additional “graceful stop” method would be performed on the former, so as to keep internal representations of behaviours intact. This extension can also be implemented equivallently with a “stale check” state that reinitializes internal representation when finding internal representation stale in each action.